OpComms System IV Mechanical Design Log
This page details the mechanical design and manufacturing process for the latest revision of the Optical Communications Team receiver system, System IV, otherwise known as Baby Black Box. Although the first design iteration of this system is complete, some refinements may follow, with the possible addition of a laser to the receive node to enable bidirectionality in communications and alignment.
Initial Design Concept
The design goals of this system were: (1) to decrease weight, so as to decrease strain on the motor, (2) complementarily, to decrease torque on the motor, particularly in the axis of altitude rotation, and (3) to more finely focus light into the photodetector system.
The first two goals were addressed by purchasing a [Fresnel lens] with a slightly shorter focal length than the previous system, allowing the whole receiver to have a smaller depth, and by changing the format of the frame from a Duron (hardboard) cube to a pyramid structure composed of carbon fiber, plastic, and foamcore (although this was initially planned as plastic sheeting). The carbon fiber framing serves to provide a structural element for Baby Black Box, ensuring that the thin Fresnel lens is not under any external loads and will not deform. In addition, an effort was made to provide a mounting point calibrated to the center of mass of Baby Black Box, such that the torques were balanced about the axis of altitude rotation of the motorized mount. Due to the pyramidal shape, this resulted in a reduction of torque about the horizontal axis as well. The corner mounting points set the angle between carbon fiber rods to precisely control the focal distance of the Fresnel lens, and snap connections serve to secure the photodetector in place. The foamcore sides and lens cap protect the optics of the device and to screen out external light (noise).
To address the third design goal, a secondary aspherical lens was purchased. An enclosure was created to fix this lens directly to the photodetector, with the intent that the focal calibration of this lens would be much less sensitive to misalignment from transport and handling.
The following drawings show the initial design process and supporting analysis. This is by no means constitutes a full engineering review, but demonstrates the thought process behind key design decisions.
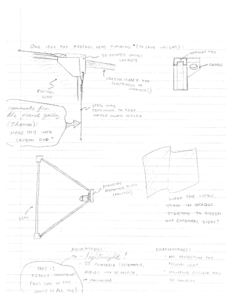
Initial design concept 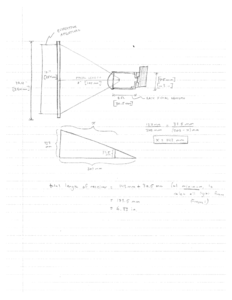
Lens focal distance/depth calculations 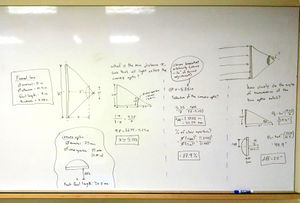
Secondary optic placement calculations 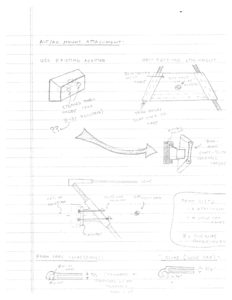
Design for mounting bracket 
Design for photodetector mounting clip





Mechanical Drawings
What follows is a the complete set of assembly and component drawings for the system. These drawings were generated with Dassault Systèmes SolidWorks.
![]() This optical communications-related article is a stub. You can help SSI by expanding it.
This optical communications-related article is a stub. You can help SSI by expanding it.
Manufacturing
The connections for Baby Black Box were 3D printed in ABS plastic using a Stratasys Fused Deposition Modeling (FDM) machine. An attempt was made to orient printed parts to align the layering of the printer such that it did not follow the principle axes of stress. Tolerances were set at 0.01 inches to create firm joints where carbon fiber rod was inserted into end caps, and to ensure sound contact in snap connectors.
The structural members were cut from 0.29" uni-axially wrapped carbon fiber rod and were cemented into their sockets once the the lengths were checked for accuracy.
An adaptor block, used to interface with the altitude azimuth mounting system, had been previously manufactured by the team. This block has one slanted side and one straight one, which match the interior surfaces of the arms' mounting system, and two mounting holes used to bolt on a receiver system. The block was machined from Delrin plastic (a brand name for acetal resin, or [Polyoxymethylene]), which is known for its durability and machinability. This adaptor was used with several previous OpComms systems.
Addition of Laser for Bidirectionality
It has been proposed that the system integrate a laser mount directly into Baby Black Box. This would allow nodes to be identical and implement a symmetrical alignment and fine adjustment algorithm in the field, as well as enabling communications in both directions. If the team decides to pursue this path, design work for a bidirectional system will commence in January of 2016.